

Overview sa Sistema
Ang non-stop weighing enforcement system nag-una nga naghatag ug business application functions para sa fixed roadside overloading detection stations. Nag-una kini nga nagsagop sa mga pamaagi sa pagpatuman nga dili kontak, nagsalig sa mga kagamitan sa pre-inspeksyon aron makompleto ang pagkakita ug pagtimbang sa mga salakyanan sa kargamento. Ang sistema mahimong mag-publish sa sobra nga impormasyon ug blacklist nga datos pinaagi sa variable message boards, ug kini nagdumala sa mga proseso sa negosyo sa digital pinaagi sa software sa fixed roadside overloading detection station.
Tipikal nga Layout
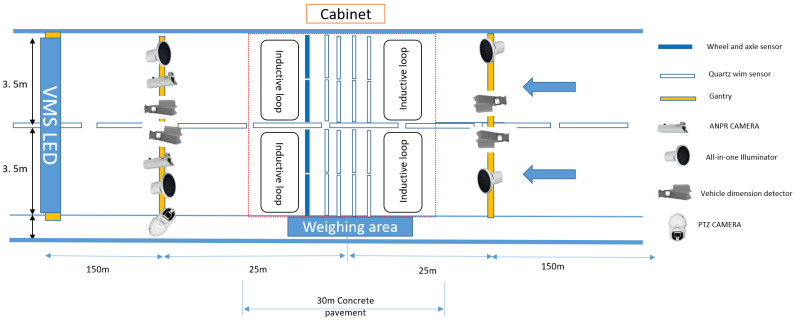
Deskripsyon sa Function
●Para sa mga sakyanan nga moagi sa main highway lane, ang sistema sa pagtimbang awtomatik nga makamatikod sa kinatibuk-ang gibug-aton sa sakyanan, gibug-aton sa ehe, gidaghanon sa mga ehe ug ligid, gilay-on sa ehe, katulin sa sakyanan, ug pagpatulin sa sakyanan.
●Ang sistema makahimo sa tukma ug epektibo nga pagbulag sa mga sakyanan ug pagdumala sa abnormal nga kahimtang sa pagdrayb sama sa pagpila sa sakyanan ug pagbag-o sa lane, pagsiguro sa mga sulat tali sa mga sakyanan ug data.
●Ang sistema adunay usa ka awtomatikong buffering function, nga nagtugot niini sa pagtipig sa usa ka piho nga kantidad sa datos. Kung mapakyas ang pagpadala sa datos sa kompyuter nga nag-overload sa daplin sa dalan, ang sistema mahimo’g ipadala pag-usab ang datos, pagsiguro sa pagkatalagsaon ug integridad sa datos.
●Ang impormasyon sa pagtimbang mahimong mapasa ngadto sa backend control computer pinaagi sa usa ka gipiho nga data interface.
●Ang sistema adunay usa ka fault self-diagnosis function, ug kung adunay bisan unsang kagamitan o linya nga kapakyasan mahitabo, ang sistema makakuha og katugbang nga impormasyon sa sayup.
●Ang sistema makatubag sa mga panginahanglan sa walay hunong, padayon, ug tanan nga panahon nga operasyon sa usa ka mode nga walay pagtagad.
●Para sa mga semi-trailer nga mga salakyanan nga dili magkaparehas sa atubangan ug likod nga mga plaka sa lisensya, ang sistema magdugang ug mga kagamitan sa pagdakop sa likod sa sakyanan aron makuha ang atubangan nga plaka ug ang plaka sa trailer.
●Makuha sa sistema ang duha ka panoramic feature nga mga hulagway sa overloaded nga mga sakyanan (lakip ang full view sa sakyanan, license plate, color, model, ug prominenteng geographical features).
Mga sangkap sa Sistema
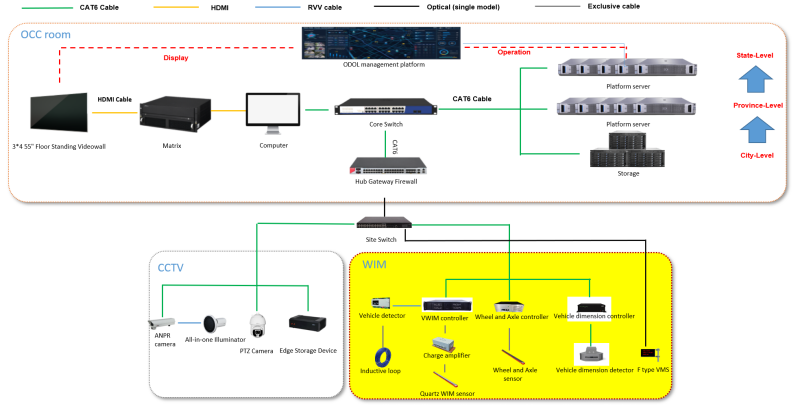
Ang non-stop weighing enforcement system naglangkob sa usa ka dinamikong high-speed weighing system, vehicle separation system, vehicle recognition system, roadside video surveillance system, roadside information release system, ug roadside information integration transmission system.
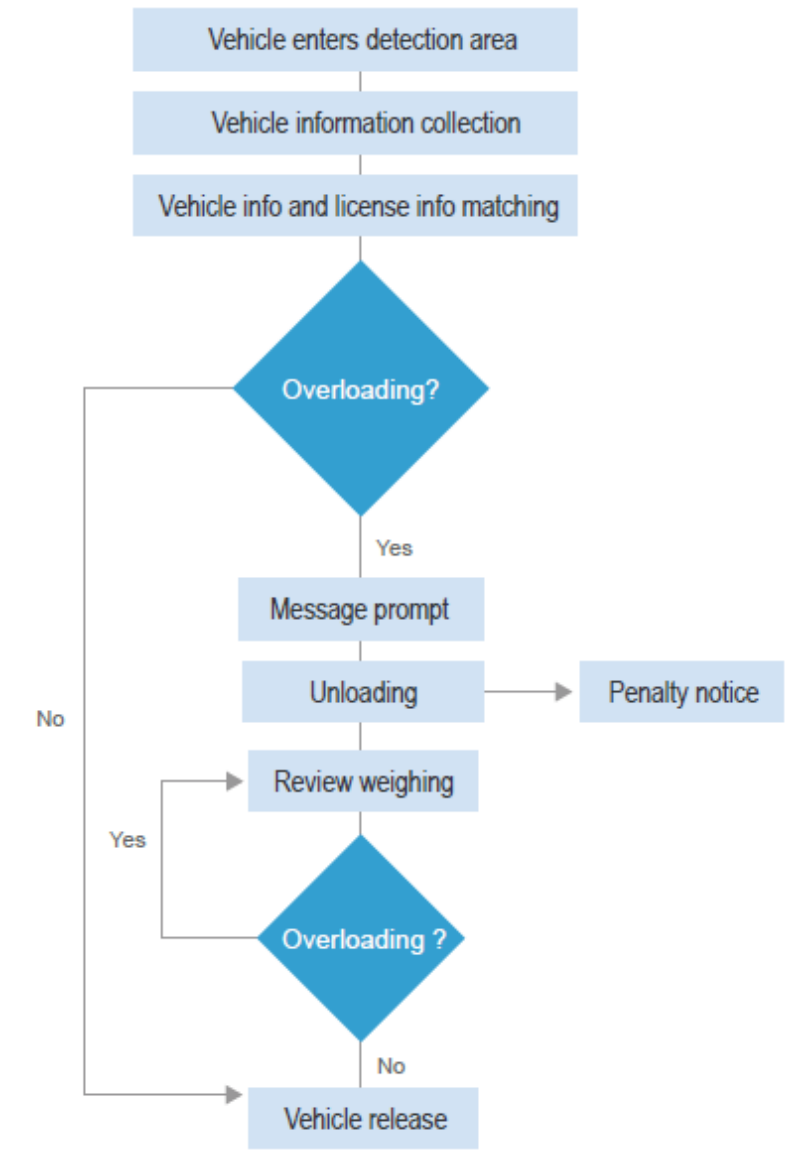
Walay hunong nga Pagtimbang sa Proseso sa Pagpatuman Diagram
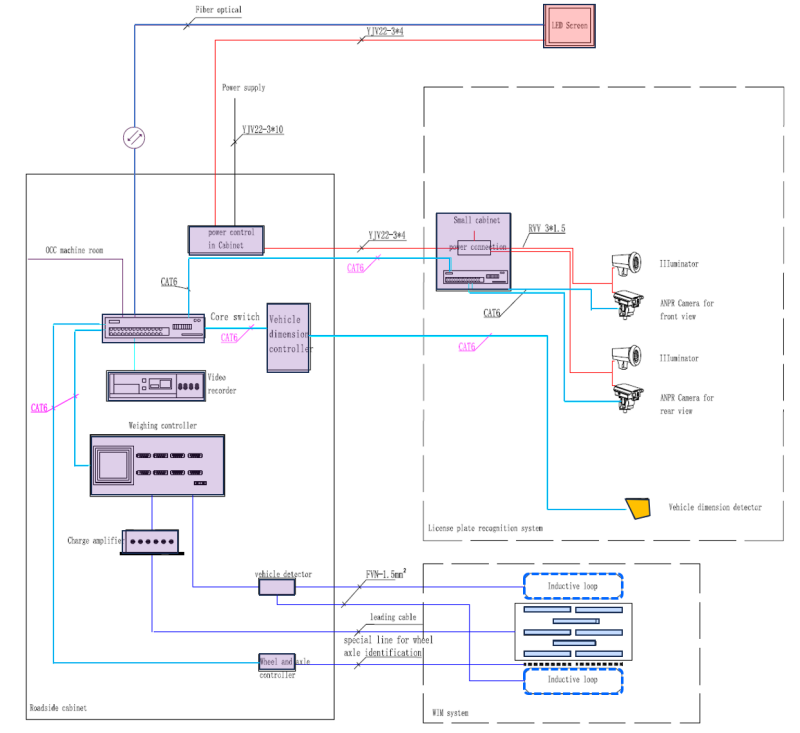
Sistema nga Topology Diagram
Panguna nga Teknikal nga mga Indicator
●Maximum axle (o axle group) load: 40,000 kg
●Minimum nga axle (o axle group) load: 500 kg
●Bili sa gradwasyon: 50 kg
●Dynamic detection speed range: 0.5–200 km/h
●Dinamikong lebel sa katukma sa pagtimbang: Grade 5
●Daytime license plate capture rate: ≥98%
●Pagkuha sa plaka sa lisensya sa gabii nga rate: ≥95%
●Pag-ila sa plaka sa lisensya ug katukma sa pagpares sa datos sa pagtimbang: ≥99%

Enviko Technology Co.,Ltd
E-mail: info@enviko-tech.com
https://www.envikotech.com
Opisina sa Chengdu: No. 2004, Unit 1, Building 2, No. 158, Tianfu 4th Street, Hi-tech Zone, Chengdu
Opisina sa Hong Kong: 8F, Cheung Wang Building, 251 San Wui Street, Hong Kong
Oras sa pag-post: Sep-13-2024




